环境中蕴藏有丰富的各种形式能量,除了大家关注的光能、热能、风能、波浪能,其实城市环境中还普遍存在被人们忽视的振动能、磁场能。这些遍地存在的微弱能量其实也可以被采集,用于城市环境中的海量传感器自供电与物联网,从而解决大面积分布式供电,或者海量化学电池供电所产生的各种弊端。虽然目前学者们发展了各种压电式、磁电式能量采集器件,但针对环境中的微弱振动能、微弱磁场能的采集,发电能力十分微弱、有限。为了解决这一问题,受自然界蜻蜓两对(四个)翼状翅膀的高效扑翼方式的启发,我们设计了一种仿蜻蜓扑翼式振动的磁-机-电耦合微能量采集器(DWL-EH)。这种新型器件拥有四个翼状磁电悬臂梁结构,并工作在两个交叉对称弯曲模态。这种设计大为增强了磁-机-电耦合,能够有效地收集城市环境中杂散磁场和微弱振动能量。在弱磁场(HAC=3 Oe,f=50 Hz)下,一个微小的DWL-EH实现了创纪录的25.89 mWavg高输出功率,同时也具有迄今为止最高的振动能量采集功率密度。即使在1 Oe的交流弱磁场下,DWL-EH也能够产生足够的功率来直接持续点亮510个LED灯。此外,收集到的能量可以为多传感器物联网系统供电,用于实时环境监测。这项工作启发了将仿生运动模态融入到能量收集器的设计灵感,为今后环境微弱能量的高效采集,提供了新的思路。
背景介绍
随着物联网(IoT)的迅速发展,能量收集已经成为备受关注的研究领域。城市环境中存在着丰富的微弱振动和杂散磁场能量,这些能源可以被采集、转化成电能,再用于自供电传感器网络。本研究基于仿生的设计原则,研发了一种仿蜻蜓扑翼式磁-机-电能量收集器(DWL-EH)(图1)。DWL-EH在磁场或振动力场激励下产生了类蜻蜓两对翼的振动模态,并实现磁场和振动能量采集和生成电功率输出;同时获得了单位体积电能产出的最高纪录。产生的电能既可以为IoT系统供电,也可以直接驱动数百个LED。本研究开拓了将仿生学与高效能量采集相结合的新的方法。
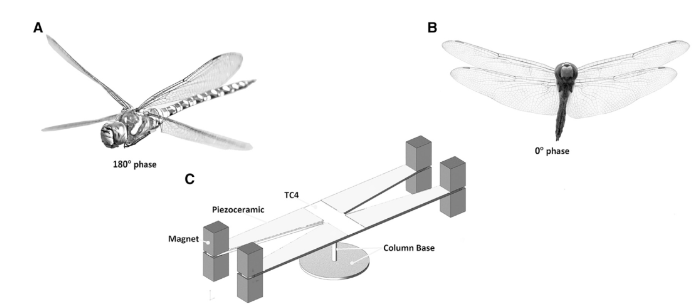
图1. 基于蜻蜓扑翼模态设计的磁-机-电(MME)耦合能量采集器结构示意图(相关视频请查看原文)。图中展示了蜻蜓在空气中拍动(或振动)的两对翅膀,分别是反相位(180°相位差,A)和同相位(0°相位差,B)。
结果分析
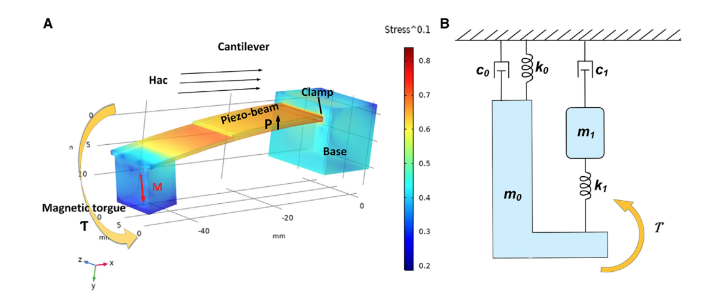
图2.传统的单悬臂梁式能量采集器。单模态能量采集的MME耦合 (A) 和它等效的弹簧质量系统 (B), 其中m0, m1,c0,c1以及k0, k1分别表示固定端和悬臂梁的等效质量、等效阻尼以及等效刚度。
传统的磁-机-电(MME)能量收集器使用的是单一的一阶弯曲模态下的压电悬臂梁复合材料,如图2A所示。然而,它是一个不稳定的系统,就好比只有一个翅膀的蜻蜓。图2B展示了单模压电悬臂梁的等效弹簧质量系统。在交流磁场或振动/力源激发的振动下,悬臂梁产生一阶弯曲振动,由于压电效应,通过压电陶瓷产生电压或电荷输出。由于其结构不对称,单模悬臂梁中不存在自然节点或节点线;因此,需要使用夹具来固定悬臂梁的一端,以保持系统的稳定性。导致系统笨重,也在夹紧端产生了能量损失。为了解决这个问题,有必要设计一种新的仿生结构,以更有效的工作模式进行能量收集。
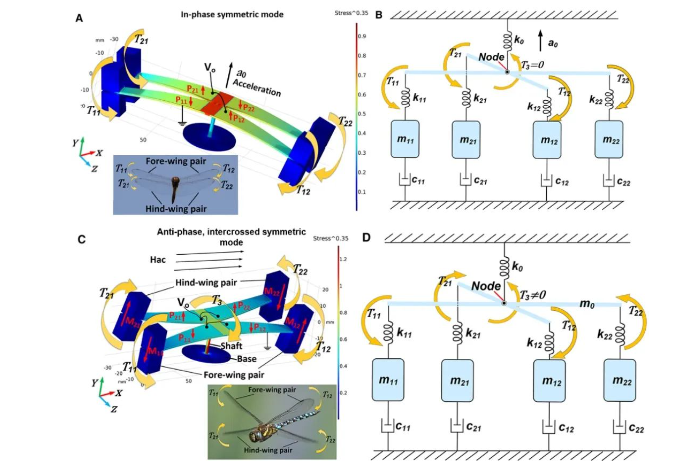
图3. DWL-EH模态。同相(A)和反相(C)振动模态及其等效弹簧-质量系统(B, D)。其中m、c和k分别是等效质量、等效阻尼、等效刚度;P11-P22指的是每个压电陶瓷的极化方向。
受自然启发,我们注意到蜻蜓在空中表现出极其灵活的动作姿态,这可以归因于其两对翅膀(前翅和后翅)在不同的飞行姿态中振动。当蜻蜓进行攻击性动作时,其两对翅膀会同相位地振动(相位差为0°);当悬停在空中时,两对翅膀会反相地振动(相位差为180°),即蜻蜓在空中达到平衡状态而无需被固定。研究表明,蜻蜓两对翅膀的相位调整可以提高效率,这也为设计基于振动的压电或磁电能量收集器带来了灵感与启发。本研究工作报道了一种类似蜻蜓翅膀结构的MME能量收集器,它也有两对翅膀,每个翅膀都是一个压电悬臂梁和一个永磁体组成。与蜻蜓翅膀扑翼飞行模态类似,两对压电悬臂梁根据输入场(磁场或力场)以反相或同相模态方式振动。在同相位模态下工作时,两对翅膀都同步地上下振动;在反相模态工作时,两对翅膀交叉上下扑翼。其等效弹簧-质量系统如图3所示,由于对称模式,相比于单模态悬臂梁,它不会产生扭矩效应(Ƭ₃=0),这也意味着中心处的能量传递损失可以忽略不计。因此,DWL-EH在两种模式下均表现出最小的能量损耗,并有效地克服了传统单悬臂梁系统常见的能量损失与不稳定性,有效提高了能量转换效率和机械品质因数,从而实现更高的输出功率。DWL-EH的另一个值得注意的点是其仅需在中心节点位置的简单支撑,而不再需要传统单模态悬臂梁型的笨重的夹紧装置。

图4. DWL-EH磁场能量收集性能。(A)测试装置;(B)1Oe交流磁场下频率-峰峰值输出电压(Vpp)曲线;(C)耐久性测试;(D)在50 Hz谐振频率下,DWL-EH在不同HAC下的负载电阻-输出均方根(RMS)电压曲线;(E)RMS电流;(F)输出平均功率;(G)在10 kΩ负载电阻下,DWL-EH的最大平均输出功率随HAC的变化;(H和I)电路和510个LED的实时点亮照片,它们由仅1 Oe的HAC直接驱动。
为了捕获50/60Hz电磁场能量,DWL-EH的谐振频率设计为50Hz。此外,为了增强MME耦合,DWL-EH 被调谐为一阶对角对称弯曲振动模态。在HAC=1 Oe、谐振频率50Hz下测得:MME耦合输出电压为45.5 Vpp/Oe,ME耦合系数为805 V cm−1 Oe−1,MME谐振器的机械品质因数为Qm=84。正如预期,实验结果表明DWL-EH表现出更强的弱场能量收集能力。图4显示了DWL-EH在HAC=0.5、1和2 Oe(50、100和200 μT)的平均输出功率在10kΩ负载下达到了最大,分别为1.36 mWavg、4.45 mWavg、12.8 mWavg(或102.4mWpp,峰峰值输出功率),显著高于之前报道的MME能量采集器。值得注意的是,这种显著增强的输出功率是基于廉价的市售压电陶瓷材料和钛合金(TC4)板的结构优化设计来实现的,并且加工过程简单。1 Oe以下产生的功率甚至可以直接实时点亮510个LED(参见原文视频和图4)。如图4c所示,我们还连续记录了输出电压,发现DWL-EH在施加HAC=1 Oe的情况下能够不间断运行并产生稳定的输出功率超过100小时,验证了其实际应用前景。
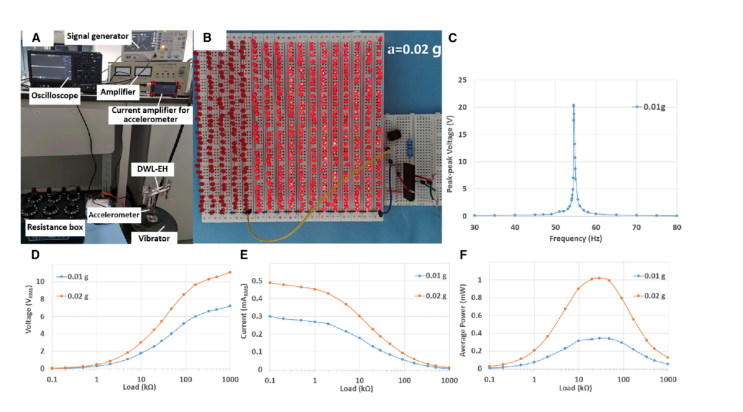
图5. DWL-EH的振动能量采集性能。(A)振动能量收集测试装置;(B)在振动加速度0.02g的激励下,直接点亮360个LED;(C)频率-峰峰输出电压曲线;(D)谐振状态不同加速度下,随着负载电阻变化收集器的输出均方根(RMS)电压,(E)输出RMS电流和(F)输出RMS功率的变化曲线
振动能量收集的实验测试装置如图5A所示。在加速度为0.02g的微弱振动下产生的电能足以直接持续点亮360个LED灯(见图5B)。图6e-f分别显示了DWL-EH的测量输出RMS电压、电流和功率随负载电阻变化的情况。在振动加速度为0.02g时,最大输出功率高达1.02mWRMS。这个结果还表明,DWL-EH对微小振动非常敏感,这对于真实的微弱能量收集应用非常有意义。DWL-EH的输出功率密度可计算为131mWRMS g−2 cm−3,是迄今为止报道的MME振动能量收集器中最高的。
基于DWL-EH的自供电IoT传感器系统。(A)系统示意图,(B)1 Oe交变磁场下47 mF电容器的充放电曲线,(C)IoT系统测得的温度和湿度曲线随工作时间的变化;分别记录了人为干扰在t=28、32和105分钟时对环境温湿度的影响。
为了证明所提出的DWL-EH的可行性,构建了由DWL-EH驱动的无线传感器通信系统。如图6所示,DWL-EH能够在2分40秒内将47mF超级电容充电至3.58V,然后启用Zigbee通信,并在接下来的时间内将检测到的数据成功传输到PC。测量结果显示,在1 Oe磁场下3分钟内采集的能量就足以让传感器运行2.5小时,并允许Zigbee向PC传输300次温湿度信息。然后电容可以在1分钟内充电至3.3V,让传感器持续工作2小时以上,达到了“充电1分钟,通讯2小时”。工作时间与充电时间之比高达120,这意味着DWL-EH仅需充电一分钟即可同时运行120个传感器。
DWL-EH从工业机器(球磨机)收集的振动能量和从家用电器收集的杂散磁场能量足以驱动物联网设备。结果发现,收集到的电力足以保持温度和湿度传感器以及Zigbee模块持续工作(参见原文视频)。
总结
总之,本研究开发了一种新型仿生蜻蜓翼式能量收集器,有效的减少了能量损失,增强了的磁-机-电耦合。在工频HAC仅为3Oe的情况下, DWL-EH仅需简单的支撑并产生了25.89mWavg(~207mWpeak-peak)的创纪录输出功率,比目前报道的MME能量采集器高了2.87倍。即使在HAC=1 Oe的情况下,DWL-EH产生的功率也足以直接持续点亮510个发光二极管(LED)阵列。此外,DWL-EH也能够有效地收集微弱的振动能量。在0.025g微弱振动加速度下,DWL-EH产生的输出功率密度高达131 mWRMS g−2 cm−3,达到了迄今为止的最高性能。收集的能量可以为多传感器物联网系统进行持续供电,实时监测环境变化。本研究表明,自然启发的设计原则可能是未来城市环境中与物联网设备集成的能量收集器的更有效策略。